基于X射线图像的坚果盒异物检测
2021-05-27 15:37:23 来源: 食品安全导刊
□ 苏思懿 阮顺杰 方逸肖 林翰 应宏微(通信作者) 宁波工程学院电子与信息工程学院
摘 要:针对坚果盒中混入异物的问题,本文提出一种基于X射线图像的非接触式异物检测技术——采用标准测片模拟坚果盒内的异物、基于数字图像处理技术提取出X射线图像中物体的多种特征,据此实现对坚果盒内异物的自动检测。实验结果表明,该检测算法可实时精确地检测异物,检出率为99.6%、误检率为1.3%,有利于提高坚果盒的生产质量。
关键词:坚果盒 X射线图像 图像处理 异物检测
1 引言
现如今,坚果盒中混入异物的情况时有发生,如生产线上的螺丝松动掉入食品中、原材料本身含有小石子等杂质……且食品中可能掺入的异物种类很多,如金属、玻璃、塑料、毛发、砂石等,误食后易造成人身伤害。因此,在坚果盒的生产和包装过程中,诸如光学检测、核磁共振技术等检查方法常被应用于异物检测[1,2]。然而,光学检测技术往往只可用于检测产品表面的异物,核磁共振技术的成本及要求较高,且仅对石头等部分异物的检测效果较为明显。基于X射线图像的异物检测是一种更有效的检测方法,由于X射线对不同材质的物体具有不同的穿透率,即穿透坚果盒后会形成深浅不一的灰度图像,即灰度值体现了物体的密度特征。因此,可以利用图像处理的方法根据不同区域的灰度值和形态特征自动判定是否存在异物。
2 检测方法
2.1 材料
为比较识别算法的性能,采用标准测片模拟混入坚果盒中的异物:直径分别为4、3、2、1.5、1.0mm的石英球测片5颗;直径分别为0.8、0.7、0.6、0.5、0.4、0.3mm的304不锈钢球测片6颗;直径分别为5、4、3、2、1.5、1mm的陶瓷球测片6颗;长度为2mm,线径分别为0.7、0.6、0.5、0.4、0.3、0.2mm的304不锈钢线测片6条。以上测片的大小、密度、材质等特征与坚果盒日常所混入异物的特征基本相似。
将坚果盒分为A、B两组,在A组坚果盒内放入异物标准测片,B组作为对照组保持无异物。根据坚果在盒内的分布均匀程度,A组又分为坚果平铺A1组和坚果侧铺A2组;B组也分为坚果平铺B1组和坚果侧铺B2组。采用50kv、1500μa的X射线扫描得到A1、A2、B1、B2这4组X射线图像用于算法测试,如图1所示。
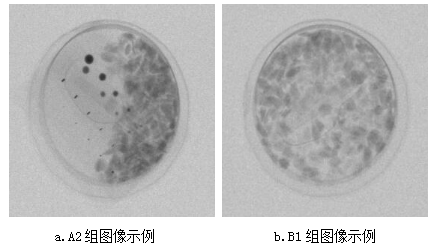
图 1 坚果盒内 X 射线图像示例
2.2 算法描述
通过对A1、A2、B1、B2这4组图像集的分析,基于所提出的检测算法步骤如下。
①分割原始图像,去除坚果盒外接矩形以外的部分,得到感兴趣区域R。
②采用Sobel算法[4]强化感兴趣区域内部的边缘信息,得到边缘图像E,同时使坚果盒内部的果肉和异物的边缘轮廓得到加强。
③经过以上处理后得到的Sobel边缘图像E是灰度图,故必须转换为二值图才能区分边缘与背景。设置阈值T0,当E中的像素灰度值大于T0时,设其为边缘,赋其值为255(白色);否则设为背景,赋其值为0(黑色),从而获得二值图像B。
④由于坚果盒内边框的灰度值和异物灰度值较为接近,而边框的存在会对异物检测准确率起到较大影响,故必须屏蔽内边框。内边框一般以果盒中心为圆心,直径略小于盒外径,因此将这个圆外的区域全部置为0就可以屏蔽果盒内边框。定于阈值T1=盒内直径/盒外直径,T1=0.9时,可以较好的屏蔽果盒内边框。
⑤检测出图像B内的连续闭合曲线,即闭合轮廓,然后填充轮廓内部,形成块状连通域[5,6],异物块形状基本得到显现。
⑥连通域填充后进行腐蚀运算[7],其目的在于将面积过小的连通域(主要是图像噪声)消除,同时将过于靠近的连通域分离。然后,进行一次膨胀运算,维持剩下的连通域面积基本不变。
⑦采用4连通判别算法来对各个连通域进行标注,赋予每个连通域唯一的编号。
⑧由于异物与其局部的周边环境差异较大,故需获取异物周边的特征,为此进行连通域膨胀,膨胀次数T2=3,标注出每个连通域的外围区域,计算出外围区域平均灰度(OutAvgG)。
⑨计算每个连通域的面积(area)、内部的平均灰度(InAvgG)及最小灰度(minG),并统计异物数量。
2.3 参数说明
根据上述算法,需要对连通域外围区域平均灰度(OutAvgG)、连通域面积(area)、连通域内部平均灰度(InAvgG)及连通域最小灰度(minG)这4个参数进行测定,以判别连通域是否为异物。
异物的面积通常有一个范围,若连通域的面积在范围之外,则该区域判别为非异物,判别公式如(1)所示。

式中:L为连通域集,x为连通域标记值,area(x)为标记值等于x的连通域的面积,T3为异物的最小面积。当连通域面积小于T3时,则该连通域不是异物。
异物的灰度值通常较低,即看上去颜色较暗。若异物内部的最低灰度值大于阈值T4,则该连通域不是异物,判别公式如(2)所示。

式中:minG(x)表示标记值为x的连通域的最小灰度,T4为异物的最低灰度值。
通常情况下,异物周围的环境灰度较高,因此异物连通域的平均灰度值和外围区域的平均灰度值的差值通常大于阈值T5,小于该阈值则说明该连通域与周围环境差别不大,即可认为是异物,判别公式如(3)所示。

式中:OutAvgG(x)表示标记值为x的连通域的外围部分的平均灰度值,InAvgG(x)表示标记值为x的连通域的内部平均灰度值。
3 检测结果
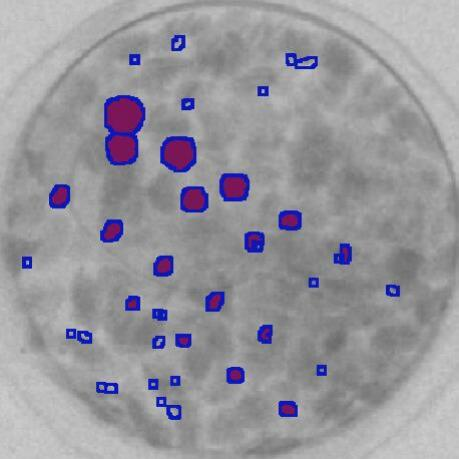
图 2 检测效果图
在上节所述的T0~T5共6个阈值中,T0~T2是程序阈值、T3~T5是异物特征约束阈值。实验发现,当T0=100、T1=0.9、T2=3、T3=4、T4=140、T5=10时,检测算法的综合性能最优,检测效果如图2所示,具体性能指标如表1所示。
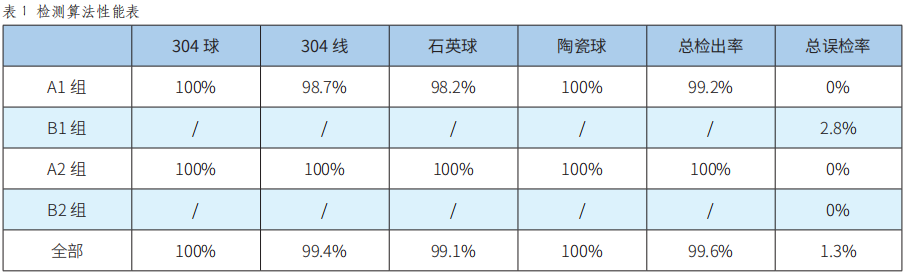
图2与表1的数据充分证明了本算法的有效性。在实际的X光机产品参数调试中,若已知异物的种类组合,通过调节参数阈值还可以进一步提高检测率、降低潜在的误检率。本文所提出的检测算法在测试电脑(主频2.5GHZ,内存8G)上处理一幅X射线图像的时间约为40~80ms,可以满足每秒至少处理12幅图像的速度需求。
4 结论
基于坚果盒的X射线图像,本文采用数字图像处理技术成功实现了对坚果盒内异物的自动检测,所取得的检测率、误检率、检测速度等性能指标能满足相关企业的要求。
参考文献:
[1] 赵镇俊.探究食品安全检验检测技术与方法[J].现代食品,2019(01):74-76.
[2] 王慧.化学技术在食品安全检测中的应用[J].现代食品,2019(04):166-168.
[3] 钟永智.数字X射线图像处理及其应用[J].电视技术,1995(04):53-59.
[4] 韩龙飞,逯超.基于改进Sobel算子边缘检测的实现[J].汽车实用技术,2019(08):109-111.
[5] 卫洪春.一种改进的多边形区域填充算法[J].电脑知识与技术,2016,12(02):210-212.
[6] 卫洪春.扫描线多边形区域填充的改进与图像信息提取[J].电子设计工程,2018,26(12):172-176.
[7] 王弘毅,赵欢.基于数学形态学预处理的Canny算子边缘检测算法[J].菏泽学院学报,2019(02):25-29.
基金项目:浙江省教育厅科研项目(Y202044368);宁波工程学院科技项目(2020018);宁波工程学院学生科研项目(2019031)。
作者简介:苏思懿(1999-),女,浙江温州人,本科,研究方向:图像处理。





热点推荐
-

全十红红稗饼干|中秋团圆,回家必备
-

和汪氏蜂蜜共同来普及蜂蜜结晶现象
-

拿坡海开启西餐加盟新潮流, 大众化家庭小西餐成未来新趋势
-

摩购空间“霸王餐”来袭 打破传统营销套路带动商家业绩翻倍
-

开学季食安隐患猛增 禧云食安开展公益行动助力意识提升
-
基于X射线图像的坚果盒异物检测
-
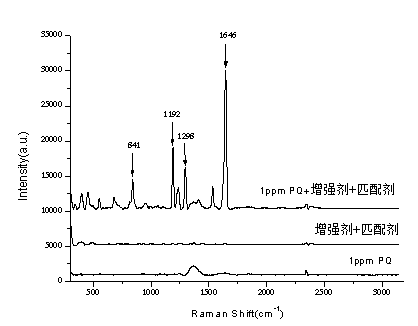
表面增强拉曼光谱法快速检测调味品中的百草枯
-
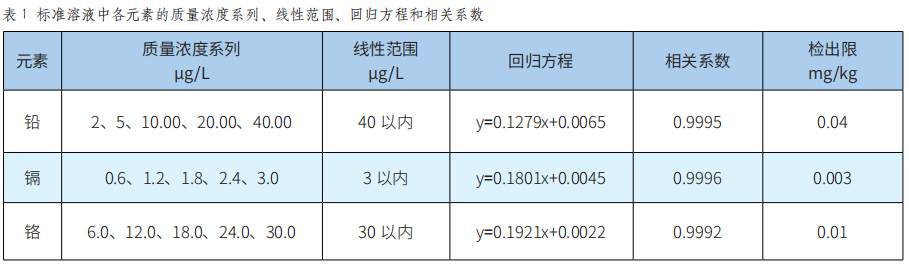
潞党参重金属污染物含量的评估
-
电位滴定法测定特殊医学用途食品中氯化物的不确定度评定
-
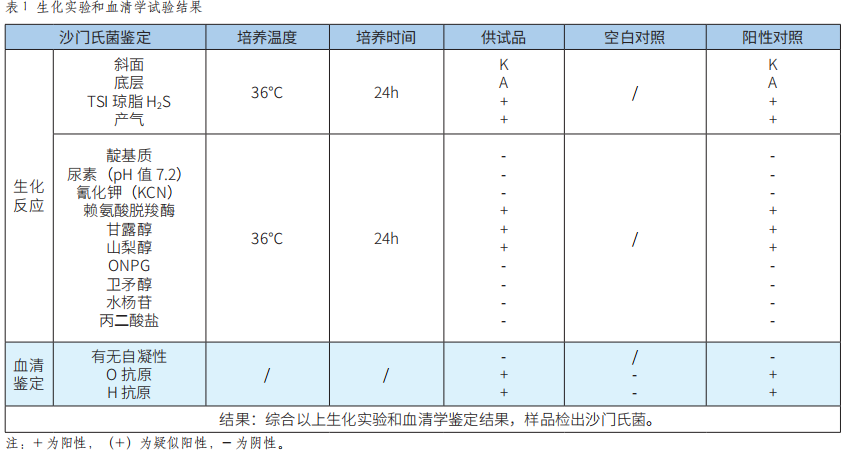
API 20E鉴定系统等两种检测方法应用于食品中沙门氏菌的检测结果
-

2020年上海市青浦区肉制品中单增李斯特菌分子分型及耐药性分析
-
一种基于ATP荧光反应的洁净度检测系统的开发与验证
-
固相萃取-高效液相色谱-二极管阵列检测法测定饮料中9种人工合成着
-
一种检测盐霉素胶体金试纸条的研制及其应用
-

高效液相色谱法测定绿豆糕中5种常见的食品添加剂
-

液相色谱-串联质谱内标法测定全麦粉中呕吐毒素含量的不确定度评
-
浅析QuEChERS方法结合色谱串联质谱技术在果蔬农药残留检测中的优势
-

食品检测技术问题及其解决措施研究
-
梅特勒-托利多最新版 ProdX™ 软件引入工业 4.0 功能
-
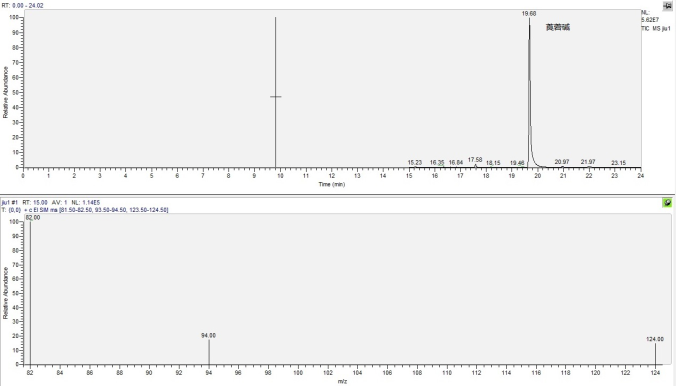
气相色谱-质谱法测定曼陀罗药酒中莨菪碱的含量
-

食品中鸡源性成分标准检测方法的比较性研究
-
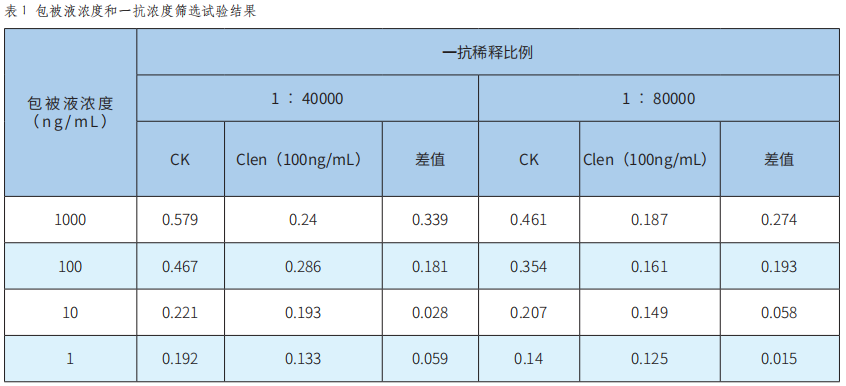
基于银沉积的微间隙阵列电极检测盐酸克伦特罗的方法研究
-
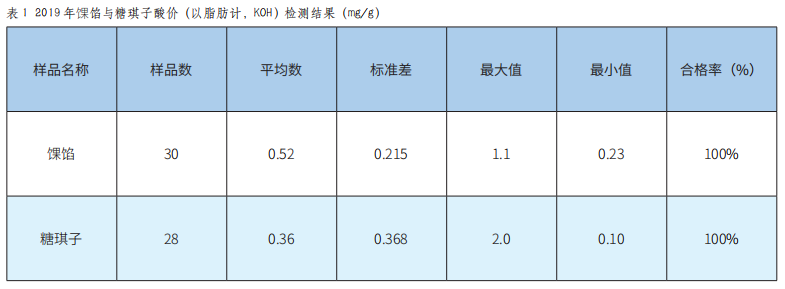
2019年榆林市监督抽检馃馅与糖琪子的酸价、过氧化值检测结果分析
-

超高效液相色谱法测定秋葵籽油中苯并芘的含量
-

咸阳市2019年监督抽检小麦粉中过氧化苯甲酰的检测分析
-
快速检测技术助力生鲜乳及巴氏杀菌乳的质量控制
-

优化液质联用法对氟喹诺酮类药物残留的检测
-
一种滴滴涕胶体金免疫快速检测试纸条的研制
-

一种甲氨基阿维菌素胶体金免疫快速检测试纸条的研制
-

超高效液相色谱-串联质谱法测定辣椒油中的溶剂红52